| GPS és társai |
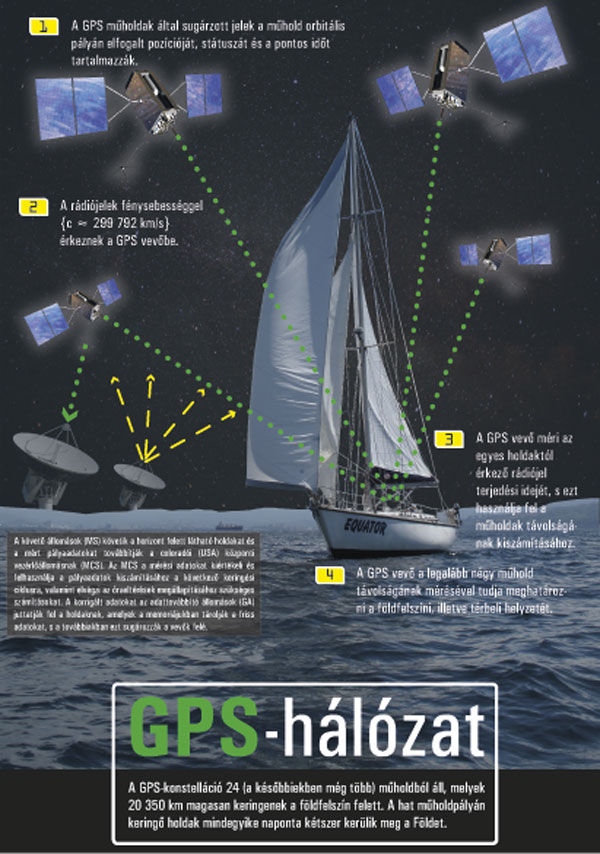
|
| Írta: Balazs | ||
| 2014, MARCH 20, THURSDAY 09:16 | ||
Az amerikai műholdas navigációs rendszert, a GPS-t mindenki ismeri, sokan használják is. Azonban nem csak a GPS létezik, vannak globális és regionális versenytársai is (amelyek egyben partnerei is) és ezeknek számos alrendszere van. Jelen pillanatban egy konkurenciája van, továbbá két másik világméretű rendszer van kiépítés alatt, amelyek már tesztüzemben működnek. Ezeket azonban kevesen ismerik, így az sem túlságosan közismert, hogy a rohamos fejlődés következtében ebben az évtizedben milyen változásokra számíthatunk.
Látható, mennyire nem közismertek a műholdas navigációs rendszerek, és az általuk biztosított, valamint a jövőben kínált lehetőségek. Pedig a GLONASS az amerikai GPS-szel együtt épült, de sokáig titkos katonai rendszerként működött, csak a 2000-res évek elején nyitották meg a polgári felhasználók előtt. Már ma vannak olyan vevőkészülékek, amelyek mindkét rendszer műholdjairól érkező jeleket képesek venni. A GALILEO az EU legnagyobb, ismétlem a legnagyobb projektje, mégis elég keveset hallunk arról, hogy a katonai ellenőrzés alatt álló GPS-től való függetlenség okán euró milliárdokat fektetnek a 2020-ig felálló saját globális műholdas navigációs hálózatba. Ugyanakkor a lendületesen feltörekvő kínai gazdaság is képessé vált arra, hogy egymaga kifejlesszen egy regionális műholdas hálózatot, amit szintén 2020-ig világméretűvé bővít. Az évtized végére a Föld körül több mint 100 navigációs műhold fog keringeni, amelyek segítségével a Föld bármely pontján, bármikor képesek leszünk méteres pontossággal – az alrendszerek segítségével pedig centiméteres pontossággal – meghatározni a földrajzi helyzetünket. Mindez az olyan interoperábilis vevők segítségével, amelyek bármelyik rendszerhez képesek csatlakozni, mégpedig a felhasználó beavatkozása (sőt, tudta) nélkül.
Miután már ma sem a GPS az egyetlen navsat rendszer, helytelen a „GPS” tulajdonnevet általánosságban a műholdas navigáció megnevezésére köznévként alkalmazni. Ez olyan, mintha a mobiltelefonos hálózatokat nemes egyszerűséggel csak „tékom”-nak vagy „orindzs”-nak hívnánk, noha jól tudjuk, hogy ezeknek több szereplője van, melyek egymás versenytársai és partnerei is egyben, amikor felváltva használjuk őket. Célszerűbb tehát, ha megtanuljuk a műholdas rendszerek neveit, általánosságban pedig a globális navigációs műholdas rendszereket gyűjtőnéven, az angol Global Navigation Sattelite Systems elnevezésből eredő GNSS mozaikszóval illetjük!
GNSS = Global Navigation Sattelite Systems
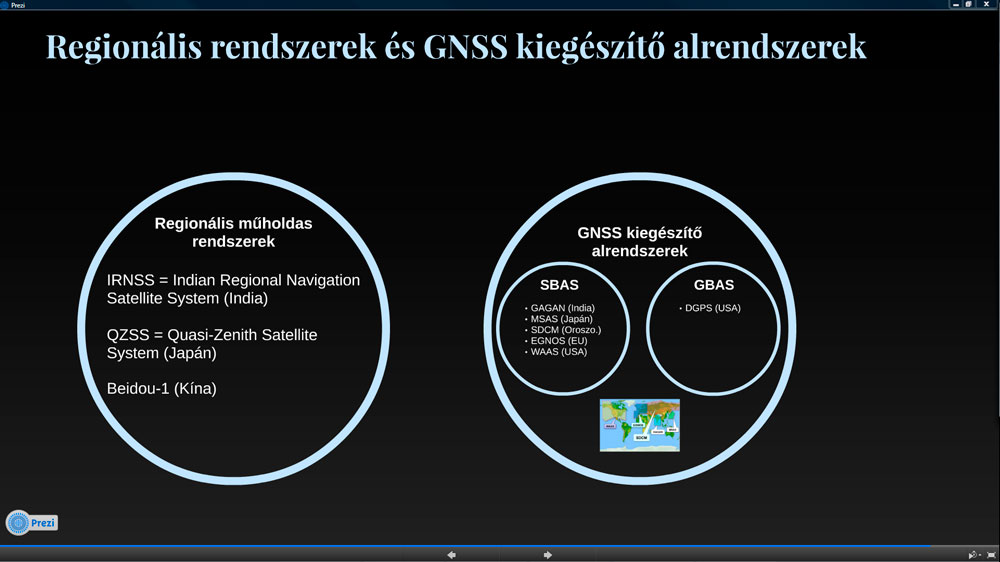
A regionális rendszerek között szót ejtünk a japán QZSS-ről, az India által felépített IRNSS-ről és a kínai Beidou-1 rendszerről, amiből a Beidou-2 (más néven Compass) globális hálózat kiépül.
A GNSS alrendszerei két nagy csoportra oszlanak: a műhold alapú (SBAS) és a földi bázisú (GBAS) helyi alrendszerekre, melyeknek az a szerepe, hogy az általuk lefedett területen precízebb és speciális szolgáltatást nyújtsanak a felhasználók számára.
ELŐZMÉNYEK
Mielőtt alaposabban szemügyre vennénk az elektronikus navigáció csúcsát képező műholdas hálózatokat, tekintsük át a rádiónavigáció főbb állomásait. Nem kell időben sokat visszalépni: a XIX. és XX. század fordulójára megyünk vissza (jóllehet, az első lépések megfigyelésére még jó néhány évtizedet visszaléphetnénk…).
A rádióiránymérő (RDF) és a RADAR
A rádiózás elterjedésével hamarosan nyilvánvalóvá vált, hogy egy rádióadó iránylata megfelelő antenna segítségével megmérhető, ez pedig – a vizuális iránylatméréshez hasonlóan – jól használható navigációs célokra, mégpedig ez előbbinél jóval nagyobb távolságokon. A rádióiránylatok mérésének alapelveit ebben az időszakban dolgozták ki. A rádióhullámok visszaverődésének jelensége, a visszhang szintén alkalmasnak mutatkozott arra, hogy navigációs célokra használják fel. A század elején zajló forradalmi változásokkal kapcsolatban Marconi, Tesla és az orosz nevét kell megemlíteni, továbbá Rudolf Kühnhold német kísérleti fizikust, a Kriegsmarine (német haditengerészet) kieli Kommunikációs Rendszerek Kiséleti Intézetének tudományos igazgatóját a Funkmessgerät, a „rádió mérőberendezés”, a radar német atyjaként emlegetik. A francia mérnök, Émile Girardeau 1934-ben olyan radar rendszert fejlesztett ki, melynek terve „Tesla által megfogalmazott elvek szerint fogant”. Popov már balti-tengeri rádiókísérletei során lejegyezte, hogy a rádiójel visszaverődésének jelensége felhasználható lenne tárgyak észlelésére. Amikor 1924-ben a német Luftwaffe gépei mélyen berepültek a Szovjetunió területére, a szovjetek megfigyelő rendszert akart kiépíteni. Pavel Oscsepkov a Leningrádi Elektrofizikai Intézettel együttműködve rádiójelek alkalmazásával kezdte a kísérleteket, s hamarosan 3 km-en belül sikerült repülőgépet észlelni. A kutatást megakasztotta, hogy Sztálin 1937-ben lefejezte a hadvezetését. A kutatásokat irányító légierő főparancsnokát kivégezték, Oscsepkov pedig 10 évre szibériai gulágba került. Nyolc éves kutató munkát követően a Szovjetunió úgy lépett be a II. világháborúba, hogy nem volt használható radarberendezése.
Itt meg kell említeni a magyar Bay Zoltánt is. A budapesti Műegyetem professzora a Sas rádiólokációs rendszerrel 1944-ben a János-hegyről Székesfehérvárig látott és repülőgépeket tudott észlelni. Tegyük hozzá, hogy Bay a háború után is végzett kísérleteket a radarral: 1946-ban radarvisszhangot fogott a Holdról, így a radarcsillagászat egyik kiemelkedő úttörőjének számít.
Bár számos országban (Dél-Afrikában, Ausztráliában és Új-Zélandon, sőt Japánban is) végeztek kísérleteket a radarral, végül is Nagy-Britanniában sikerült használható eredményt produkálni. Robert Watson-Watt jelentős szerepet kapott ebben a munkában, őt tekintik a radar „feltalálójának” – de talán jobb, ha a „gyakorlatban is használható radar megalkotójának” nevezzük.
A II. világháború kitörésekor mind az angolok és amerikaiak, mind a németek és olaszok, de még a japánok is rendelkeztek valamilyen, többé-kevésbé használható felderítő eszközökkel. Angliában, a Temze torkolatában felállították az öt rádióállomásból álló Chain Home rádióiránymérő rendszert. Németországban a Standard Elektrik Lorenznél kutató Dr. Ernst Kramar fejlesztette ki a rádióadók segítségével végzett egyenlőjelű adók közötti iránymérést, amely a Sonne nevet kapta. Más frekvenciákon dolgozott a hasonló Mond és Stern nevű hálózat, amelyet a Luftwaffe és a német U-boatok (tengeralattjárók) használtak. Egy alkalommal a briteknek sikerült elfogniuk egy Sonne-térképet, amiről úgy gondolták, hogy ami jó a németeknek, az jó a briteknek is, így létre hozták a saját rendszerüket, a Consolt. A Sonne rendszer nagy előnye az volt, hogy csak egy egyszerű vevőre volt szükség, viszont nem volt elég pontos és érzékeny volt a rádiózavarásra, az interferenciára. Az angolok tehát azzal tudtak védekezni, hogy sikeresen zavarták a német állomások adását, így a német repülők az üres mezőket bombázták. A Consol-rendszer viszont igen nagy hírnevet szerzett a háború alatt, így később is ajánlott navigációs rendszer maradt, olyannyira, hogy az utolsó még üzemelő stavangeri (Norvégia) adó csak 1991 után (!) fejezte be működését. Hiperbola-navigáció
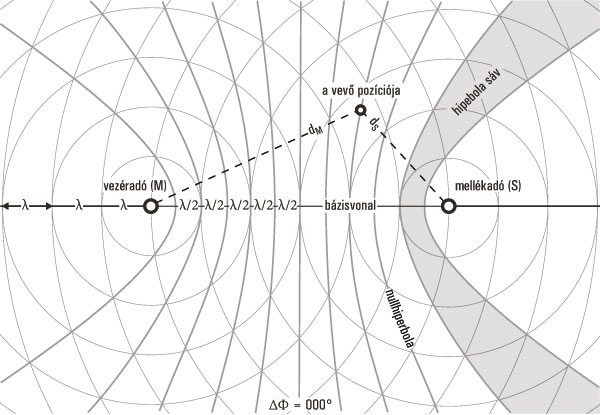
Az úgynevezett hiperbola-navigációs rendszerek a harmincas években több szálon indulva jelentek meg és fejlődtek, elsősorban a II. világháborús haditechnika részeként. A hiperbola-navigáció elve a rádióhullámok segítségével a rádióadók között mérhető távolságkülönbségek meghatározásán alapul. A távolságkülönbségeket leíró matematikai függvény a hiperbola, a térképen meghatározható helyzetvonalak hiperbolák lesznek. Több rádióadó pár segítségével több hiperbola metszésvonala adja a vevő meglehetősen pontos földrajzi pozícióját.
A rendszerek közül a tengeri navigációban a három legismertebb és legelterjedtebb a brit DECCA, a különböző amerikai LORAN-rendszerek és az amerikai fejlesztésű, első alkalommal világméretű lefedettséget biztosító OMEGA-lánc.
1944-ben az első QM Decca-láncot a dél-angliai parton állították fel, mely szerepet kapott a Neptun-hadműveletben: az Admiralitás 21 aknakereső hajót szerelt fel vevőkkel, amelyek QM-lánccal sikerrel navigáltak az Angol-csatornán, miközben a normandiai partraszállás előkészítéseként megtisztították a területet az aknáktól. A háború után a Decca-láncok Európában, majd a világ más tájain egyre szaporodtak és nagy népszerűségre tettek szert a polgári felhasználók körében. A műholdas rendszerek megjelenésével a Decca ideje lejárt, így a Decca Navigator System működése 2000. március 31-én éjfélkor leállt.
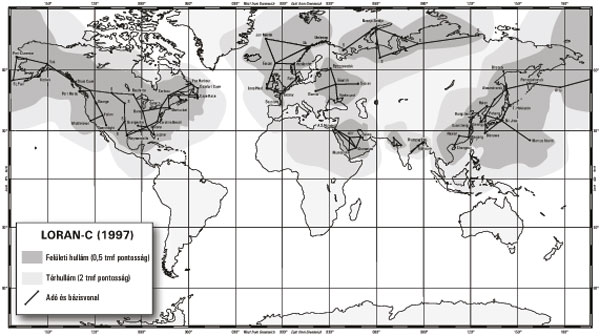
Az amerikai LORAN (LOng RAnge Navigation szavakból alkotott mozaikszóként) első hálózata, a LORAN-A 1943 elejére állt fel, majd az ötvenes években telepített LORAN-C láncok az USA egész kontinentális területét és Alaszkát lefedte, de a Földközi-tengeren, Szibériában, a Közép- és Távol-keleten is számos lánc épült.
A 90-110 kHz frekvenciasávban üzemelő LORAN-C 0,25 tengeri mérföldnél jobb abszolút pontosságot szavatolt a megfelelően felszerelt katonai és civil járműveknek, nappal 1200, éjjel akár 2400 tengeri mérföld távolságig. Kereskedelmi, halász- és sporthajók is használták. A LORAN-rendszer az elmúlt évtizedben a műholdas rádiónavigáció nagyarányú előretörése következtében elavulttá vált, így a LORAN-C 2010. február 8-án befejezte a működését. Az amerikai LORAN-rendszer szovjet megfelelője a CHAYKA.
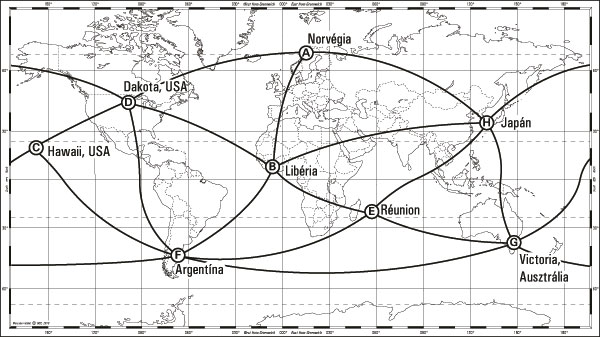
Az OMEGA hiperbola-navigációs rendszert az U.S. Navy dolgozta ki a katonai légi járművei részére. A hálózat kiépítése1968-ban indult, s valóban az egész földfelszínen 4 mérföld pontosságú pozíció meghatározást biztosított. Az ötvenes-hatvanas években a kísérleti rendszert még RADUX-nak hívták, de miután a rádióspektrum alsó határán a 10 kHz frekvenciát választották vivőfrekvenciának, John Alvin Pierce, az „Omega-rendszer atyja” a görög ábécé utolsó betűjét, az omegát választotta a rendszer nevének. Az igen alacsony frekvencia kisugárzásához kb. 400 méter magas antennatornyokat kellett építeni, amelyek 10 kW teljesítménnyel sugároztak. Összesen csak 8 nagyméretű antennát állítottak fel a világ különböző pontjain.
Amikor a műholdas rendszerek széles körben elterjedtek, az Omega működése gazdaságtalanná vált, a további üzemeltetése indokolatlan lett. 1997. szeptember 30-án minden állomás véglegesen beszüntette az adást. A rendszer szovjet ellenpárja az ALPHA.
OMEGA ADÓTORNYOK Az Omega adótornyaival kapcsolatban két érdekes helyszín érdemes megemlíteni. A Kaneohe Omega-állomás Ha’iku Oaku-n (Hawaii) az U.S. parti őrség kezelésében állt. 1943-ban húzták ki az antennát két 850 méteres sziklacsúcs közé a Ha’iku-völgy fölött. Az építkezéshez majd’ 4 000 fokból álló meredek lépcsőt építettek, amit úgy emlegetnek, mint „lajtorja a mennyországba” (Stairway to Heaven), mert a völgyből nézve a lépcső felső része elvész a hegyekre telepedő felhőben. A lépcső veszélyessége okán ma zárt terület, de vakmerő fiatalok időnként megmásszák, és videóikat feltöltik a YouTube-ra. A II. világháború alatt az antenna hosszúhullámú rádióadóként üzemelt a tengeralattjárókkal való kapcsolattartásra. Ezzel az adóval ugyanis egészen a tokiói-öbölben járó amerikai tengeralattjárókat is el tudták érni, még akkor is, ha a hajók víz alatt maradtak! A hatvanas évek végén alakították át az Omega rendszer csendes-óceáni állomásává – ez az egyetlen állomás, ahol nem kellett extra magas tornyot építeni, mert az antennát maguk a hegyek tartják.
A libériai Paynesville Omega-adótorony 417 méteres magasságával Afrika legmagasabb építménye. 1997-ben leállt a rendszer, az egész rádióállomást átadták a libériai kormánynak. A rácsszerkezetű torony – noha a festése megkopott – nem rozsdás most sem. Libériában a fémhulladék az egyik legkeresettebb árucikk, ennek ellenére, meglepő módon a torony még ma is áll. Ma már szabadon megközelíthető, a bátrabbak még fel is mászhatnak a létrákon, szó szerint a felhők közé. A működése során szigorúan lezárt volt a torony környéke is, ennek köszönhetően számos érdekes elmélet született a helyiek között a rendszer „valódi természetét” illetően. Egyesek szerint a torony gigantikus megfigyelő eszköz volt: „A rendszer olvasni tudott az emberek agyában. Ha valaki Libéria ellenes gonosz szándékkal érkezett, az antenna ezt felfedezte, s egy repülőgép felszippantotta az illetőt a torony tetejére, ahol letartóztatták.” A rendszer azonban valahogy nem működött, amikor Charles Taylor, a libériai polgárháború prominens hadura, a későbbi libéria elnök ide érkezett. (Charles Taylor később a hágai nemzetközi bíróság elé került.)
Az első műholdas navigációs rendszerek
Néhány nappal az után, hogy 1957. október 4-én a szovjetek pályára állították az első Szputnyik műholdat, az amerikai Johns Hopkins Egyetem alkalmazott fizikai laboratóriumának (APL) két tudósa a műhold rádiójeleinek Doppler-eltolódásából meghatározta a Szputnyik orbitális pályájának adatait. Az eredményt látva felvetették, hogy ha a műhold pályája ismert és előre jelezhető, akkor a Doppler-hatást fordítva is ki lehetne használni, s a földfelszíni vevő helye is meghatározható lenne. A kutatások a következő évben kezdődtek, s az első kísérleti műhold 1960. április 13-án sikerrel pályára állt. 1964-ben a TRANSIT – nevezték NAVSAT-rendszernek is (Navy Navigation Satellite System) – műholdas helymeghatározó rendszer öt szatellittel dolgozni kezdett. Az alacsony poláris pályán, 600 tmf (kb. 1000 km) magasságban keringő műholdak 106 perc alatt kerülték meg a Földet. A teljes földfelszín lefedettségéhez öt műhold kellett, de volt tartalék hold is. A poláris pálya azt jelenti, hogy a pályák a Föld tengelyében keresztezték egymás az északi és a déli pólus felett, míg az Egyenlítő felé közeledve legyezőszerűen szétnyíltak.
Még 1967 nyarán a Navy bejelentette, hogy a rendszer a kereskedelmi hajózás és repülés számára is megnyílik. A rendszer pontossága jelentősen nagyobb volt, mint az Omegáé, és használata is egyszerűbbnek bizonyult. A felhasználók száma több tízezerre emelkedett (1991-ben kb. 90.000 felhasználója volt), ezzel jelentősen meghaladta a katonai felhasználók arányát.
Egy mérés kb. 12 percig tartott, s további 8-10 percre volt szükség, hogy a vevő fixpontot adjon. Amennyiben a műhold a mérési időszak alatt kedvezőtlen helyzetbe került (túl magas vagy alacsony horizont feletti magasságba jutott, vagy a horizont alá bukott), a méréssorozat megszakadt, s várni kellett a következő kedvező helyzetben látható műhold megjelenésére. Így a fixpontokat maximum 20 perces időközökben szolgáltatta a vevő. A földrajzi helyzet azonosításán kívül a rendszer alkalmas volt a felhasználó sebességének mérésére is. A mérés pontossága durván 200 méter volt. 1988-ban bocsátották fel a rendszer utolsó műholdját, s miután a GPS térnyerése miatt a TRANSIT elavulttá vált, 1996 végén, több mint 32 éves szolgálat után beszüntették a szolgáltatást. A műholdas navigáció alapelve
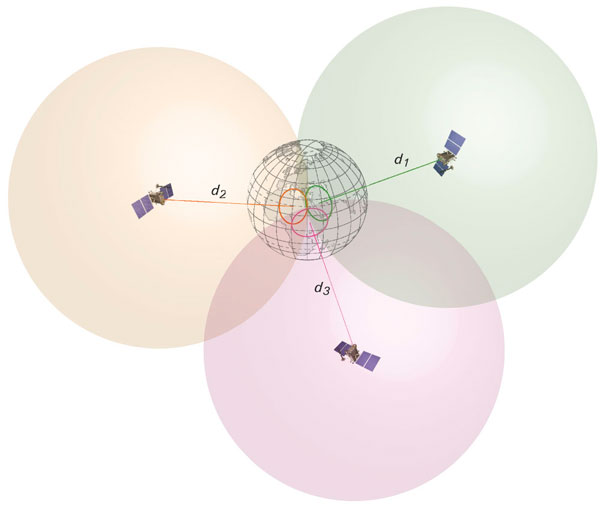
A műholdas navigáció alapelve sokban hasonlít az előd hiperbola navigációs rendszerekéhez. A műholdas rendszerben a rádióadók azonban nem a földfelszín adott fix pontján helyezkednek el, hanem a Föld körül orbitális pályán keringő műholdakon. Másik lényeges különbség, hogy a műholdas navigáció során a vevők műholdak távolságát, és nem a vevő és az adók közötti távolságok különbségét használják fel az eljárás során, azaz a helyzetvonalak nem hiperbolák lesznek. Mivel a térben mozgó rádióadók távolságát mérjük, a módszer térbeli helymeghatározásra alkalmas, vagyis a földfelszíni közlekedési eszközök navigációján kívül sok egyéb területen, pl. a repülésben, geodéziában, térképészetben, vagy akár a bányaművelésben is felhasználhatók a mérési eredmények. Lévén a műholdtól azonos távolságban lévő pontok összessége gömbfelület, több műhold távolságának szimultán távolságmérése során kialakuló képzeletbeli gömbök metszéspontja adja meg a vevő térbeli pozícióját. A távolságméréshez igen pontos időmérésre van szükség, lévén a rádióhullámok terjedési sebessége megegyezik a fénysebességgel.
A műholdas navigációs rendszerek előnye a földi bázisúakkal szemben, hogy a nagy magasságban a világűrben keringő műholdakról a Föld teljes felszínét be lehet sugározni. Ez azt jelenti, hogy kellő számú műhold alkalmazásával a rendszer globálissá tehető. A műhold által sugárzott rádióadás vivőfrekvenciája a rövidhullámú sávokba esik, ezáltal kisméretű antennák használhatók. A kis teljesítmény ellenére a rádióhullámok az ionizációs rétegeken átjutnak és egyenes vonalban terjedve szinte zavartalanul érhetik el a vevők antennáját. Az adásokat kódolják, így csak azok a vevők hasznosíthatják a műhold által sugárzott információkat, amelyek erre jogosultak.
A rendszerekben a navigációs célú műholdakat geometriai alappontként használják fel. Mivel a holdak pályaadatai ismertek, ezek a műholdak egy adott időpillanatban ismert pontoknak tekinthetők egy előre definiált vonatkoztatási rendszerben (legismertebb a GPS által használt amerikai WGS-84 vonatkoztatási rendszere). A pályaadatokat a mesterséges holdak navigációs üzenetben sugározzák a vevők felé. A felhasználó, azaz a GNSS-vevő közvetett módon meghatározza a távolságot a vevő és az egy időben észlelt műholdak között, majd ezen távolságok, a pontos idő és a műholdak térbeli helyzetének ismeretében a vevő helyzete a megadott vonatkoztatási rendszerben kiszámítható. Mivel a távolságmérések folyamatosak, a vevő helyzete pillanatról pillanatra folyamatosa rendelkezésre áll. Ezzel a vevő sebessége is számítható, hiszen ismert a vevő két helymeghatározása között eltelt időtartam. Mindez persze automatikusan zajlik, a felhasználó beavatkozása nélkül. Vagyis a rendszer nem csak földrajzi értelemben globális, mert különösebb szakismeret nélkül bárki használhatja, amennyiben rendelkezik megfelelő vevőberendezéssel.
A rendszer fontos eleme az időmérés. A pontos idő meghatározása alapvető a rendszer és a helymeghatározás szempontjából, ahogy a pontos idő meghatározása a XVIII. században is megoldásra vezetett a földrajzi hosszúság megállapítása során. Akkor John Harrison kronométerei oldották meg a földrajzi hosszúság problémáját (erről bővebben a 2014. május 6-i „MARITIME GREENWICH ÉS A FÖLDRAJZI HOSSZÚSÁG” című előadáson lehet majd hallani).
Az időméréssel három műhold távolsága mérhető, azaz a méréshez legalább három műholdat kell „látni”. A pontos időt a műholdak atomórái szolgáltatják, a vevőkben elhelyezett óra azonban kevésbé pontos, így a vevőnek órahibája miatt egy negyedik műhold vétele is alapvetően fontos. Négy ismeretlen meghatározásához pedig négy lemért távolságra, azaz négy műholdra van szükség. Emiatt olyan műholdas konstellációt kell felállítani, amely lehetővé teszi, hogy bármely földfelszíni ponton, bármely időben kellő magasságban legalább négy hold legyen látható.
A globális és regionális műholdas navigációs alaprendszerek hármas felosztásúak, azaz a
Az űrszegmenst maguk az orbitális pályán mozgó műholdak alkotják. Minden rendszerre jellemző a holdpályák mérete és elhelyezkedése, a holdak száma, az alkalmazott frekvenciasávok és a holdak által sugárzott kódolt navigációs üzenet. A földi követőállomások vezérlő, mérő és feltöltő állomásokból állnak. A GNSS felhasználónak rendelkezniük kell a műholdjelek vételére alkalmas GNSS-vevővel.
A globális helymeghatározás felhasználóinak köre igen tág a szárazföldön, a tengeren a levegőben és az űrben. Mivel navigációról van szó, számunkra magától értetődő, hogy a tengeri közlekedésben nagy jelentőségű a műholdas helymeghatározás, hiszen a nyílt tengeren ez a legpontosabb és leggyorsabb módszer a hajó helyzetének megállapítására. Nyilvánvalóan hasonló a helyzet a légiközlekedésben, finomítva a fel- és leszállás segítő megoldásokkal, amit lokális hálózatok támogatnak. Lényeges terület a mentés és felkutatás (Search and Rescue, SAR) akár a tengeren, akár a szárazföldön. Mára széles körben elterjedt a közúti közlekedésben is a GNSS használata, útvonalkeresésre, a közlekedési logisztikában, járműkövetésre (használattal arányos autópályadíjak meghatározására, a járművek lopás elleni védelmére, stb). A polgári felhasználók között a földmérők (geodéták, térképészek, térinformatikusok) ugyan csak egy szűk réteget képviselnek, viszont ők igénylik a legnagyobb pontosságot.
Nyilvánvaló, hogy a katonai célú felhasználásban is nagy szerepe van a pontosságnak és a megbízhatóságnak. További felhasználási területek (a teljesség igénye nélkül): kommunikációs és energiarendszerek szinkronizációja, a geológiában a tektonikus mozgások követése, komplex mérnöki monitoring, állatok követése és környezetvédelem, valamint a személyi követők.
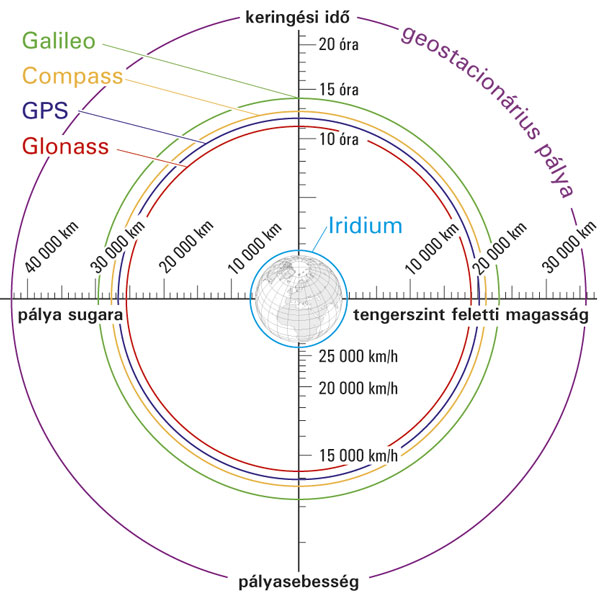
A globális rendszerek közös műszaki jellemzői az ITU 9: ultra magas frekvenciasáv (Ultra High Frequency, UHF), a 20 000 km körüli pályamagasság, és 25-35 műhold üzemeltetése egy rendszeren belül.
GPS
A hatvanas években a rakéta- és műholdkísérletekkel nyilvánvaló lett, hogy az addigi eredményeket egy közös programban kellene egyesíteni. 1973-ban a Pentagonban döntöttek az űrvédelmi navigációs rendszer (Defense Navigation Satellite System, DNSS) létrehozásáról, amely később a NavStar nevet kapta. A név az előd műholdakat, a TRANSIT és más egyedi holdak összességét jelentette, Navstar-GPS-re módosult névvel. Ennek rövidítéséből ered a ma használatos GPS (Global Positioning Sytem) elnevezés.
1978. február 22-én lőtték fel az első kísérleti Block-I GPS műholdat. Javában folytak a kísérletek, amikor hatalmas nemzetközi felháborodást kiváltó eset történt, amely ismét feszültebbé tette az enyhülő hidegháborús hangulatot. Történt ugyanis, hogy 1983. szeptember 1-jén a Korean Air Lines New Yorkból Anchorage-on keresztül Szöulba tartó 007-es járata navigációs hibák miatt lezárt szovjet légtérbe tévedt a szovjet távol-keleti partok felett, Szahalin és a Moneron-sziget térségében. A polgári forgalomban részt vevő Boeing 747-es repülőgépet 269 utassal a fedélzetén a szovjet légvédelem nemes egyszerűséggel lelőtte. A tragikus eset következményeképpen Reagan amerikai elnök bejelentette, hogy amint a GPS-rendszer feláll, polgári felhasználók számára is elérhetővé kell tenni, hogy a polgári légi forgalomban ne fordulhasson elő hasonló eset. 1985-ben tíz további kísérleti Block-I műholdat állítottak pályára, de csak 1993 decemberére érte el a rendszer teljes kiépítettségét, 24 műholddal. 1995 júniusára jutott teljes egészében működőképes állapotba. Azóta rendszer fejlesztése és a műholdak cseréje folyamatos. 2000-ig a „szelektív elérhetőség” zavarást alkalmazták a polgári felhasználók felé, ezzel csökkentve a helymeghatározás pontosságát. Mivel a nagy népszerűségnek örvendő amerikai rendszernek versenytársai akadtak, 2019-ig lecserélik a jelenlegi műholdakat, hogy a szolgáltatás versenyképes maradhasson a világpiacon. 2012-ben az amerikai GPS piaci részesedése a becslések szerint 95%-is volt.
A rendszer elemei:
Vezérlő szegmens. A földi ellenőrző és vezérlő rendszer feladata a műholdak figyelése, azok pontos pályaadatainak kiszámítása és rendszeres felülvizsgálata. A kiszolgálóegység a coloradói központi vezérlőállomásból, 16 követőállomásból és 12 betápláló és adattovábbító állomásból áll.
Műhold szegmens. A GPS műholdas alrendszerét jelenleg 32 műhold alkotja. Ebből mindenkor legalább 24 mesterséges hold üzemel. A holdak hat közepes földtávolságú pályasíkon (Medium Earth Orbit, MEO), 20 200 kilométer keringési magasságon vannak elosztva. A pályák közel kör alakúak. A holdak keringési periódusa 11 óra 58 perc 2 mp, azaz naponta kétszer kerülik meg a Földet. Jelenleg a második generációs Block IIF műholdak pályára állítása zajlik, 2014. február 20-án lőtték fel az ötödik Block IIF holdat. A teljes sorozat 12 darabból fog állni.
A Block III lesz a GPS műholdak legújabb generációja, mely jelentősen továbbfejlesztett navigációs képességekkel és teljesítménnyel bír majd, ugyanis versenybe kell szállnia a konkurens GNSS-rendszerekkel, melyek már eleve nagyobb fejlettséggel rajtolnak a műholdas rendszerek versenyében. A Block III holdak képesek lesznek a többi rendszerrel való együttműködésre és a zavarás, kalózkodás ellen is ellenállóbb lesz, és a felkutatás-mentés hatékonyságának fokozása érdekében új rendszer indul el Distress Alerting Satellite System (DASS) néven. A Lockheed Martin által gyártandó első Block III hold fellövése 2016-ra várható.
Felhasználói szegmens. A felhasználói berendezések, azaz vevőberendezések feladata a műholdak jeleinek, üzeneteinek vétele és a vett adatok feldolgozása. A számítások eredménye a vevő két-, illetve háromdimenziós pozíciója, a sebesség- és időadatok.
A rendszer működését az alábbi ábra mutatja be.
GLONASS
Az orosz GLONASS a GPS-szel ellentétben kevésbé ismert. Történetében előfordult számos nehézség politikai gazdasági okokra vezethetők vissza. A jövője a világszerte közismert GPS-szel összehasonlítva bizonytalanabbnak tűnik, bár az orosz vezetés a jelenlegi, köztes állapotú rendszer további fejlesztését deklaráltan támogatja. Ezzel Amerikának és Európának is számolni kell, a GLONASS erős versenytárs, egyben partner is, így a többi műholdas helymeghatározó rendszer fejlesztése alapvető és összekapcsolódik a GLONASS jövőjével is, hiszen a rendszerek kompatibilitására törekednek.
Bár az első jól működő műholdas rendszer az amerikai TRANZIT volt, a Szovjetunió mégis valamivel korábban indította el CIKLON nevű testvérrendszerének fejlesztését. A globális lefedettséget biztosító amerikai GPS-rendszer technikai kihívására, és a hadsereg igényire reagálva, 1976-ban a Szovjetúnió is döntést hozott a saját, GLONASS névre keresztelt hálózat létesítéséről. Az orosz névnek (ГЛОНАСС, GLObalnaja NAvigacionnaja Szputnyikovaja Szisztyema) teljesen megfelelő angol elnevezésből „GLObal Navigation Satellite System” képzett mozaikszó adja a rövidítést.
A Szovjetunió szétesése, majd Oroszország belső politikai és gazdasági problémái miatt a fejlesztés megakadt. 1988-tól az orosz kormány deklarálta a rendszer továbbfejlesztésére vonatkozó szándékát, majd később a GLONASS-t nemzetközi használatra is felkínálta, remélve, hogy külföldi pénzügyi támogatókat nyerhet meg a jövőbeli fejlesztés céljából. 2001-ben azonban az orosz kormány döntése alapján a rendszer magas prioritást kapott, s 2007-ben Vlagyimir Putyin aláírta azt a rendeletet, amely a felhasználók számára szabaddá tette a rendszer használatát. 1995 után meg is jelentek az első GPS-GLONASS vevők a piacon.
Az első GLONASS-műholdat 1982. október 12-én lőtték fel, a teljes 24 holdas alakzattal 1995-ben jött létre. Bár összesen 81 műholdat lőttek fel, ez az első generációs konfiguráció ma már nem üzemel.
A második generációs GLONASS-műholdak az „M” (modernizált, módosított) sorozat megjelölést kapták. Bár a fejlesztések már 1990-ben megkezdődtek, az első GLONASS-M hold 2003-ban állt pályára, 2010 márciusában már húsz üzemelt, további nyolc beüzemelés előtt állt. 2012 végéig további 11 műholdat helyeztek üzembe. A következő generációs, GLONASS K2 műholdak 2013-tól kerülnek pályára, míg a modernizált GLONASS-K szatelitet GLONASS-KM néven, 2015 után lövik fel. A cél az, hogy a teljesítmény összemérhető legyen a GPS-szel. A 347 millárd rubel költségvetésű GLONASS föderációs program a jelenlegi tervek szerint 2020-ig tart.
Ahogy a többi műholdas navigációs rendszer, a GLONASS is hármas felosztású, azaz a műholdak (űrszegmens), a földi követőállomások, és a felhasználók alrendszereiből épül fel. A GLONASS földi szegmens állomásait az Orosz Föderáció területén helyezték el. A tervezett hat külföldi állomásból az első az Antarktiszon, az orosz Bellingshausen bázison létesült, a másik pedig Novolazarevszkaján épül. Több állomás épül a déli féltekén Brazíliától Indonéziáig.
A GLONASS űrszegmens műholdas konstellációja 24 Glonass-M üzemelő holdat tartalmaz, melyek durván cirkuláris orbitális pályán helyezkednek el 19.100 km magasságban. A műholdak keringési ideje 11 óra 15 perc és 45 másodperc. A GLONASS átlagos pontossága kissé elmarad a GPS-től, viszont magas északi és déli szélességeken a GLONASS-műholdak orbitális pályák elhelyezkedése révén pontosabb! Zárt terekben, magas épületekkel övezett városi utcákon és hegyvidéki területeken a pontosság jelentős mértékben, 2,37–4,65 méterre növelhető. A GLONASS-K holdak rendszerbe állásával, valamint a földi szegmens teljes kiépítésével a GLONASS pontossága 2020-ra 0,6 méter vagy annál jobb lesz.
A kombinált GPS-GLONASS vevők száma napjainkban világszerte tízezres nagyságrendű. Jelenleg több cég (pl. C-Nav, Magellan Navigation, Trimble) is gyárt a GLONASS vételére alkalmas GNSS-vevőt. A SkyWave Mobile Communications INMARSAT kommunikációs terminálja egyaránt használhatja a GLONASS és GPS-t. A Garmin eTrex legújabb sorozata is támogatja a GLONASS vételét. Egyes okostelefonok is beintegrálták az orosz rendszert. A pusztán csak a GPS vételére alkalmas vevők hamarosan olyan fehér hollók lesznek, mint például manapság a monokróm chartplotterek vagy a fényképezésre alkalmatlan mobiltelefonok.
GALILEO
A 90-es évek második felében az európai döntéshozó szervezetek felismerve a műholdas helymeghatározás és navigáció stratégiai jelentőségét, az Európai Unió első generációs, regionális navigációs műholdprojektet indított EGNOS néven. Ez más, mint műholdas telepítésű GNSS kiegészítő alrendszer (SBAS), amely a GPS-műholdak jeleit felhasználva, azoknál pontosabb helymeghatározást tesz lehetővé. Az EGNOS jelenleg már működik.
2002 márciusában az Európai Unió és az Európai Űrügynökség megállapodott a saját, polgári üzemeltetésű globális műholdas navigációs infrastruktúra felállításáról, melyet Galileo Galileiről neveztek el GALILEO-rendszernek. Galilei volt az, aki 1610-ben saját fejlesztésű távcsövével felfedezte a Jupiter négy holdját, melyek a navigációban alapvetően fontos időmérésre alkalmasnak talált. Az ún. Galilei-holdak óraműszerű precíz mozgásának megfigyelésével ugyanis arra a következtetésre jutott, hogy a holdak alkalmasak lennének egy referenciaidő meghatározására, amivel pedig a földrajzi hosszúság lenne könnyedén kiszámítható. A műholdas helymeghatározásban pedig az időmérésnek alapvetően fontos szerepe van! (előadás: 2014. május 6. "MARITIME GREENWICH ÉS A FÖLDRAJZI HOSSZÚSÁG” címmel)
A GALILEO-rendszer célja és nagy előnye, hogy az egész földön polgári felügyelet alatt üzemeltetett alternatívát biztosítson a katonai kontrol alatt álló amerikai GPS és az orosz GLONASS mellett. A GALILEO az első olyan globális műholdas helymeghatározó és navigációs alaprendszer lesz, amelyet speciálisan polgári felhasználási célokra létesül. Sikeres megvalósulását követően, 2018–2020-ra igen korszerű, ún. második generációs alaprendszert eredményez.
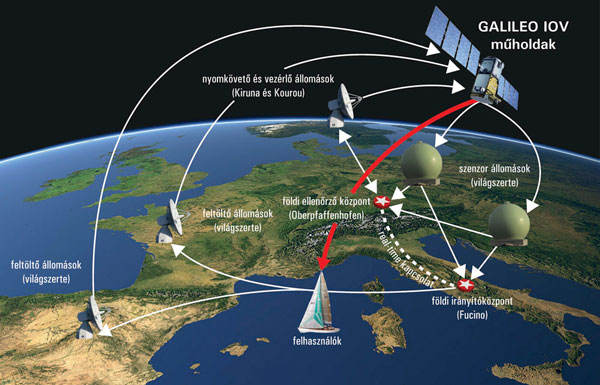
A GALILEO-program szakaszai: 1.Meghatározási szakasz 2001-ig. 2. Tesztelési szakasz, GIOVE misszió szegmens 2012-ig. Ebben a szakaszban építették ki a reprezentatív földi infrastruktúrát, építették meg és állították pályára az első teszt műholdakat, az GIOVE-A (2005) és GIOVE-B (2008). 3. Kipróbálási fázis, IOV. 2012. október 12-én kerültek pályára az új holdak, így lezárult a kipróbálási fázis. 4 darab műholddal a navigációs rendszer tesztelése 2014. február 13-án sikerrel zárult. 4. Kiépítési szakasz 1 fázis. A tervek szerint 2013-tól 2020-ig tart. Ebben a fázisban a négy teszt hold mellé további 14 holdat állítanak pályára, ezzel az alapszintű elérhetőség (rendszeres ingyenes közszolgáltatás és SAR) biztosított lesz 2015-re. A kiépítési fázis második fázisában kerül sor a GALILEO-rendszer teljes, 30 műholdas kiépítettségére, és a teljes földi szegmens felállítására. Erre azonban még várni kell, a tervek szerint 2018–2020-ra áll fel teljesen a rendszer. 5. A hasznosítási szakaszban már az összes szolgáltatás igénybe vehető, a rendszer teljes mértékben üzemel. Ettől kezdve a földi és űrszegmens karbantartása és fejlesztése, kereskedelmi üzemeltetése zajlik.
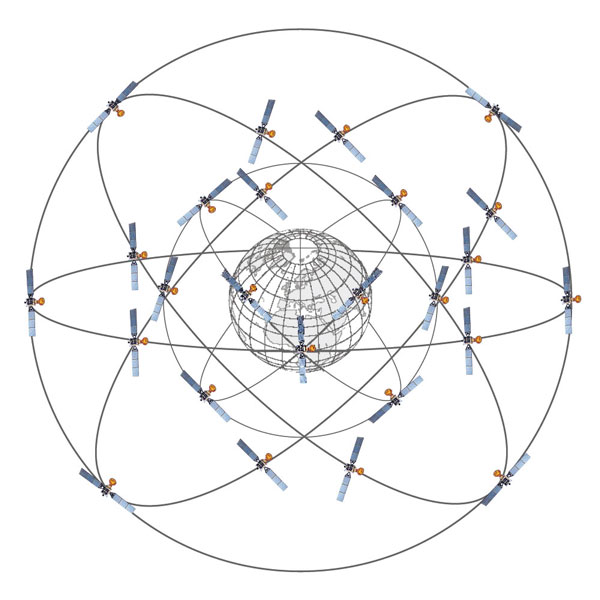
A GALILEO műholdas alrendszerét 27+3 mesterséges hold alkotja majd három közepes földtávolságú pályasíkon (Medium Earth Orbit, MEO), 23.222 km keringési magasságon egyenletesen elosztva. A pályákon 9‒9 műhold és egy-egy tartalék helyezkedik el. A tervezett élettartam 12–20 év. Az egyes mesterséges holdakon két rubidium és két passzív hidrogén mézer atomóra biztosítja a szükséges stabil frekvenciát. A hidrogén mézer atomóra az eddigi legpontosabb óra, amit valaha is navigációra használtak: a hibája három millió évenként mindössze egy másodperc!
A GALILEO földi állomásainak rendszere az űrügynökség egyik legkomplikáltabb fejlesztése. A földi szegmens két irányító- és ellenőrzőközpontot, öt nyomkövető és vezérlő központot, kilenc feltöltő állomást és világszerte telepített 30‒40 szenzor-állomást tartalmaz.
A GALILEO-jelek által biztosított szolgáltatás kétszintű: alapszint és korlátozott hozzáférésű szolgáltatási szint. Az alapszint – mint a GPS-nél és a GLONASS-nál – ingyenes.
A GALILEO öt fő szolgáltatást nyújt, melyből az első három 2014-től lesz elérhető, a maradék kettő pedig 2018–2020 után: 1. Nyilvános szolgáltatás: a földön bárhol, bármikor ingyenesen szolgáltatja a helymeghatározási és időadatokat. A multi-vevők a GALILEO-n kívül egy és/vagy több társrendszer szolgáltatását is igénybe tudja venni. 2. Felkutató és mentő szolgáltatás (Search and Rescue, SAR) nyújtásával a GALILEO hozzájárul a jelenleg működő COSPAS-SARSAT rendszer javításához. 3. Kormányzati ellenőrzésű szolgáltatás korlátozott elérésű szolgáltatás a közhatalmi szervek számára, mint rendőrség, határőrség, mentők és tűzoltóság, vagy a polgári- és katarsztrófavédelem és a békefenntartó, továbbá a nemzetvédelmi erők. 4. Kereskedelmi szolgáltatás két titkosított jelet tartalmaz, mely jelentősen növeli a helymeghatározás pontosságát. A díj ellenében nyújtott értéknövelt kereskedelmi és professzionális szolgáltatás ipari felhasználók, mint a bányászat, földmérés vagy a térképészet veszik igénybe. 5. Életvédelmi szolgáltatás már elérhető az EGNOS révén.
A GALILEO egyik előnye a GPS-szel szemben az integritási információk alkalmazása. A GALILEO jelenleg az egyetlen rendszer, amelyet úgy terveztek, hogy másodperceken belül jelezze a felhasználónak, ha egy műhold hibásan működik. Ez jelentősen növeli a rendszer megbízhatóságát. Ekképpen olyan kritikus alkalmazásokban is igénybe vehető lesz, mint pl. a légi irányítás.
A GALILEO mindenképpen felülmúlja versenytársait. Az ingyenesen elérhető műholdakkal 4–8 méteres pontossággal lehet majd mérni, de a kereskedelmi szolgáltatást igénybe vevők számára a mérés pontossága 1 m-en belüli lesz. A műholdpályák elhelyezkedése, illetve a többi GNSS-sel való együttműködés lehetővé teszi, hogy városi környezetben, vagyis „urbánus kanyonokban”, azaz magas épületek között, vagy belső terekben is elérhető lesz a szolgáltatás. Ilyen helyeken átlagosan a 40%-os elérhetőség 90%-ra javulhat.
A GALILEO-projekt nem kis befektetést igényel, de nem véletlen, hogy az EU eurómilliárdokat áldoz egy olyan önálló rendszer kifejlesztésére és felállítására, amely méltán komoly versenytársa a már régóta üzemelő GPS-nek és az időközben Oroszországon kívül is publikussá tett GLONASS-nak. 2025-re csak az európai piac várhatóan eléri a 135 millárd eurós forgalmat, de a világ legnagyobb piaca nem az európai, hanem a Távol-Keleti. Itt viszont a kínai COMPASS/BeiDou-2 rendszert hatalmas tempóban fejlesztik. COMPASS/BeiDou-2 A negyedik GNSS rendszer a kínai. Kína a kilencvenes években kezdte a saját regionális műholdas navigációs rendszerét kiépíteni. A BeiDou (kiejtése: Pejtou) kísérleti rendszer felállításának gondolata már a nyolcvanas évek elején felmerült, végül 1994-ben indult a program. A BeiDou-1, azaz a regionális rendszer 2004-től már nem csak katonai, hanem civil felhasználók számára is elérhetővé vált. A BeiDou-2 , korábbi nevén COMPASS projekt (Compass Navigation Satellite System, CNSS) Kína független, második generációs globális műholdas navigációs rendszere. A COMPASS voltaképpen nem a már üzemelő BeiDou-1 rendszer továbbfejlesztése, hanem egy olyan önálló GNSS, amely hasonló elven dolgozik, mint a GPS, a GLONASS vagy a GALILEO. A COMPASS 2004-ben indult program, elsősorban azzal a céllal, hogy Kína függetlenné váljon az amerikai GPS-rendszertől és méltó vetélytársa legyen a tervezett GALILEO-nak. A rendszer a tervek szerint 2020-ra 35 műholdból álló konstelláció lesz. 2011. december 27-e óta már 10 holddal próbaüzemben dolgozott. 2013. december végén az ázsiai és csendes-óceáni térségben megnyílt a műholdas navigációs rendszer az általános polgári, azaz kereskedelmi hasznosítás előtt, ugyanis a 16 működő űreszközt számláló Beidou használatának lehetősége 2012 végéig csak a kínai kormányzati és katonai szervekre korlátozódott. A rendszer ma kb. 10 m-es pontosságot biztosít a helymeghatározás során, a mozgó vevő sebességét pedig 0,2 m/s pontossággal tudják megállapítani. 2014-től az ázsiai és csendes-óceáni régióban már teljes mértékben kiszolgálja a felhasználókat. A 2020-as teljes kiépítettség után az egész földön elérhető lesz a nagy precizitású ingyenes és titkosított helymeghatározási, navigációs és idő szolgáltatása. Ezzel a nemzetközi piacon méltó versenytársa lesz az amerikai, orosz és európai rendszereknek. Kína gyorsan fejlődő belső piacán pedig a helyzet meghatározáson alapuló szolgáltatások a COMPASS-rendszer jelei alapján dolgozni képes vevők 2020-ra 70‒80%-os részesedést hasíthatnak ki a 10 évvel korábbi kb. 95%-os amerikai GPS részesedésével ellentétben. Mindez pénzre lefordítva: a műholdas helymeghatározó rendszer piaca 2015-re kb. 24‒32 milliárd USD lesz, 2020-ra pedig ≈ 64 milliárd USD!
A rendszer neve – BeiDou – a Nagymedve, azaz a Göncölszekér csillagkép kínai neve. A név pontosan azt a konstellációt jelöli, amit mi magyarok Göncölszekér néven ismerünk. Ekképpen a BeiDou név egyben a műholdas navigációs rendszer céljának metaforája.
A többi globális műholdas navigációs rendszerhez hasonlóan a COMPASS/BeiDou-2 is hármas felosztású, azaz a műholdak (űrszegmens), a földi követőállomások, és a felhasználók alrendszerei képezik a teljes szisztémát.
A Beidou – ellentétben a másik három GNSS-el – nem csak közepes magasságú pályákon keringő holdakkal működik, de geostacionárius, valamint nagy hajlásszögű geoszinkron pályákon elhelyezett műholdakat is. A COMPASS/BeiDou-2 űrszegmens a teljes kiépítettség idején 35 műholdból áll majd, melyből 5 geostacionárius (GEO), 30 nem-GEO műhold. Ez utóbbiakból 27 közepes föld körüli pályán (Medium Earth Orbit, MEO), 3 pedig ún. elhajló geoszinkron pályán (IGSO) helyezkedik el.
A geostacionárius pálya a műholdak olyan föld körüli, Egyenlítő fölötti égi útvonala, melyen a műhold földtengely körüli mozgásának szögsebessége megegyezik a Földével, így az Egyenlítő felett elhelyezkedő objektum mindig ugyanazon földrajzi hosszúság felett látható, vagy a földről nézve olyan, mintha mozdulatlanul „állna” az égbolton. A BeiDou-2 MEO műholdak pályamagassága 21.528 km. 2012 végén az 1. fázisban (a távol-keleti régióban működő regionális üzemben) öt Compass-G (GEO), négy (Compass-M) MEO és öt IGSO műhold üzemelt, miközben a további Compass-M holdak pályára állítása zajlik.
Az 1. fázisban a pontossága 5 méteres, de a 2. fázis kiépülésekor előre láthatóan az egy méteres pontosságot is elérő szolgáltatást a 30 földi monitor állomás korrekciós jelei biztosítják.
Regionális műholdas navigációs rendszerek és a GNSS-alrendszerek India regionális rendszere az Indiai Regionális Műholdas Navigációs Rendszer (IRNSS), mely mára már elérte a minimális működés feltételeit. A tervek szerint összesen hét, geoszinkron pályán álló műholddal üzemel majd a teljes kiépítettség idején, mely 24 műholdra bővíthető.
A japán Quasi-Zenith Satellite System (QZSS) létrehozásáról 2006-ban született döntés. Első lépcsőben a QZS–1 műholdat állították pályára. A második lépcső további két műhold pályára állítása, a harmadik pedig az operációs státusz elérése. A rendszer holdjai nem egyszerű geoszinkron holdak. A holdak pályája igen kicsi excentricitású elliptikus pálya, amely így torzított 8-as alakot kap. A nyolcas felső hurka Japán felett, a hasas alsó hurka pedig Mikronézia és Ausztrália felett húzódik. A pálya fő jellemzője, hogy mindig lesz egy Zenithez közel álló hold Japán felett (innen kapta a rendszer a nevét). A holdak nyolcóránként váltják egymást, így valósul meg a 24 órás lefedettség. QZSS-rendszer célja a GPS mérési pontosságának egyméteresre javítása, de fontos szempont az állandó rendelkezésre állás is. Ugyanis a Japán metropoliszokra jellemző sok felhőkarcoló miatt a vevők csak körülbelül 50%-os vételi idővel rendelkeznek. Ezért van szükség állandón a Zenit közelében látható műholdakra.
A BeiDou-1 a kínai regionális rendszer, mely GEO műholdakon alapul. GNSS-alrendszerek
A differenciális GNSS mérési technika lényege az, hogy egy precíziós GNSS-vevő (bázis- vagy referenciavevő) pontosan ismert koordinátájú ponton települ és az általa rendszeresen végzett méréseket felhasználva az ismeretlen ponton mozgó vevők számára a korrekciós adatokat megadja. A javításokat a hajók számára VHF vagy AM műsorszóró rádióállomások és tengerészeti rádióbóják sugározzák, amelyeknek az adását csak speciális vevők vagy közönséges rádiókhoz csatlakoztatott, dekóderrel kiegészített hagyományos vevők képesek venni, akár 1000 km távolságból is. A felhasználók így akár centiméteres pontosságot is elérhetnek, a valós sebesség mérési pontossága 0,1 csomó. Ezt a módszert valós-idejű differenciális eljárásnak nevezzük.
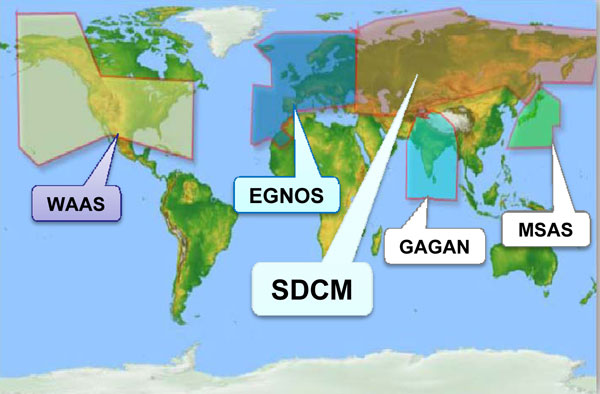
A GNSS-alrendszerek világszerte elterjed lokális hálózatok, kiegészítő rendszerek két csoportja alakult ki: 1. Műhold Alapú Kiegészítő Rendszerek (Satellite Based Augmentation Systems, SBAS), illetve 2. Földi Telepítésű Kiegészítő Rendszerek (Ground Based Augmentation Systems, GBAS).
A (fizetős és az ingyenes) SBAS – nevéből is következtethető – jelentősen nagyobb területet fed le, mint a hagyományos rádióállomásokat igénybe vevő GBAS. A teljesség igénye nélkül a nagyobb lokális hálózatok az alábbiak: WAAS – USA és Kanada EGNOS – az Európai Unió első generációs navigációs műholdprojektje GAGAN – India DORIS – Franciaország DGPS – USA CGPS – Kanada MSAS – Japán SDCM – Oroszország
Reméljük kellő tájékoztatást kapott mindenki a navigációs rendszerek felépítéséről, működéséről. Ez a cikk Horváth Csaba 2014. március 4-i előadásának, valamint a Jachtnavigátor nautikai enciklopédia hamarosan megjelenő II. kötetének „Az elektronikus navigáció története” és „Elektronikus helymeghatározás” című fejezeteinek és ábráinak felhasználásával készült.
Horváth Csaba - snewisport |
||
| LAST_UPDATED2 |